
NASA
Meltwater Turns Iceberg A-23A Blue
- Earth
- Earth Observatory
- Image of the Day
- EO Explorer
- Topics
- More Content
- About
NASA Celebrates Artemis II During Houston Texans Space City Day
NASA’s Johnson Space Center was front and center Jan. 4, 2026, as the Houston Texans faced the Indianapolis Colts during Space City Day at NRG Stadium. Fans watched the Texans win while getting a close look at NASA’s Artemis II mission, the first crewed flight of the Artemis campaign.
The Artemis II mission will send four astronauts—NASA astronauts Reid Wiseman, Victor Glover, and Christina Koch, along with CSA (Canadian Space Agency) astronaut Jeremy Hansen—around the Moon and back to Earth to test Orion spacecraft systems in deep space and help lay the groundwork for future lunar missions.
NASA connected fans with the agency’s next giant leap, reinforcing Space City’s role in shaping the future of human exploration.
NASA’s Johnson Space Center employees hold the American flag on the field during the national anthem at NRG Stadium in Houston.Image courtesy of the Houston TexansBefore kickoff, 27 Johnson employees helped unfurl the U.S. flag for the national anthem, marking the start of an evening that blended football, exploration, and Houston pride.
Johnson employees gather on the BULLevard to share the excitement of space exploration with football fans.On the BULLevard, Johnson employees engaged with fans at a NASA activation area, where visitors explored the agency’s Mobile Exhibit Trailer and learned more about Artemis II. Team members answered questions and shared how NASA is preparing to send humans back to the Moon.
From left, Johnson Community Engagement Lead Jessica Cordero, NASA astronaut Jessica Watkins, Johnson Space Center Director Vanessa Wyche, NASA Flight Controller Jonathan Guthmiller wearing the Extravehicular Mobility Unit (EMU), Multimedia Developer Jessica Krenzel, and NASA Flight Controller Sarah Hill stand together during the outdoor engagement on the BULLevard outside NRG Stadium.Johnson Director Vanessa Wyche and NASA astronaut Jessica Watkins visited the exhibit and the Extravehicular Activity and Human Surface Mobility Program booth, where they greeted team members and thanked volunteers supporting the event.
The International Space Station Program joined the celebration with a prerecorded message from the Expedition 74 crew, marking over 25 years of continuous human presence in low Earth orbit.
The Expedition 74 crew aboard the International Space Station deliver a prerecorded message to fans on the stadium jumbotron during the Houston Texans’ Space City Day game.“Even from 250 miles above the Earth, we’re proud to represent Houston and celebrate the mission of this incredible city on and off the field,” said NASA astronaut Mike Fincke.
“Today’s game reminds us how connected Houston, NASA, and the Texans truly are,” said NASA astronaut Zena Cardman.
Cardman highlighted how research aboard the International Space Station has led to innovations that benefit life on Earth, including applications now used in sports and athletic safety. Advances in materials developed for spacesuits and astronaut protection have influenced the design of modern helmets and padding, while cooling technologies originally created for extreme environments are used in training gear and protective equipment.
“Space innovation doesn’t remain in orbit, sometimes it ends up on the 50-yard line.”
NASA astronaut Jessica Watkins, center, and Johnson employees Tessa Rundle and Daniel Kolodziejcyk, wearing Orion Crew Survival System spacesuits, take the field during the Texans’ “Reppin’ H-Town” appearance. Image courtesy of the Houston Texans Johnson Director Vanessa Wyche waves to fans after participating in the ceremonial coin toss.Image courtesy of the Houston TexansJessica Watkins took the field for the Texans’ “Reppin’ H-Town” appearance, joined by Johnson employees Tessa Rundle and Daniel Kolodziejcyk wearing NASA’s Orion Crew Survival System spacesuits. The bright orange pressure suits are designed to protect astronauts during launch, flight, and reentry aboard NASA’s Orion spacecraft.
The pregame continued with Center Director Vanessa Wyche joining the festivities on the field and participating in the ceremonial coin toss, where she called heads.
About 30 seconds into halftime, the Artemis Fueling the Fire video played on the stadium jumbotron, sharing NASA’s plans to return humans to the Moon and marking a major step in the agency’s Moon to Mars campaign.
Center Director Vanessa Wyche and NASA astronaut Jessica Watkins are interviewed on the field during halftime.The video led into a live interview with Vanessa Wyche and Jessica Watkins, where Wyche discussed the Artemis II mission and Watkins highlighted similarities between astronaut training and football training. At the conclusion of the interview, the host invited fans to take part in NASA’s “Send Your Name with Artemis II” initiative, which allows the public to have their names stored on a small chip aboard the Orion spacecraft during the mission. Participants receive a digital boarding pass and virtual guest access to select NASA launches. While the names remain stored electronically inside the spacecraft, the effort symbolically gives participants a place on Orion’s journey around the Moon.
Image courtesy of the Houston Texans Image courtesy of the Houston Texans NASA/James Blair Image courtesy of the Houston Texans NASA/James Blair Explore More 4 min read 25 Years in Orbit: Science, Innovation, and the Future of Exploration Article 12 hours ago 4 min read Diving Into Human Spaceflight Safety with NASA Johnson’s Craig Shannon Article 2 days ago 4 min read I Am Artemis: Jacki Mahaffey Article 3 days ago25 Years in Orbit: Science, Innovation, and the Future of Exploration
NASA and its partners have supported humans continuously living and working in space since November 2000. A truly global endeavor, the International Space Station has been visited by more than 290 people from 26 countries and a variety of international and commercial spacecraft. The unique microgravity laboratory has hosted more than 4,000 experiments from over 5,000 researchers from 110 countries. The space station also is facilitating the growth of a commercial market in low Earth orbit for research, technology development, and crew and cargo transportation.
After a quarter of century of human presence in orbit, the station remains a symbol of international cooperation and a proving ground for humanity’s next giant leaps to the Moon and, eventually, Mars.
September’s full Moon, the Harvest Moon, is photographed from the space station, placed in between exterior station hardware.NASAThe microgravity environments aboard the space station unlocks discoveries that benefit life on Earth and prepare humans for deep space missions. NASA’s Human Research Program (HRP) works to understand the changes astronauts face aboard the orbital outpost and to develop interventions to keep crews healthy before, during, and after flight.
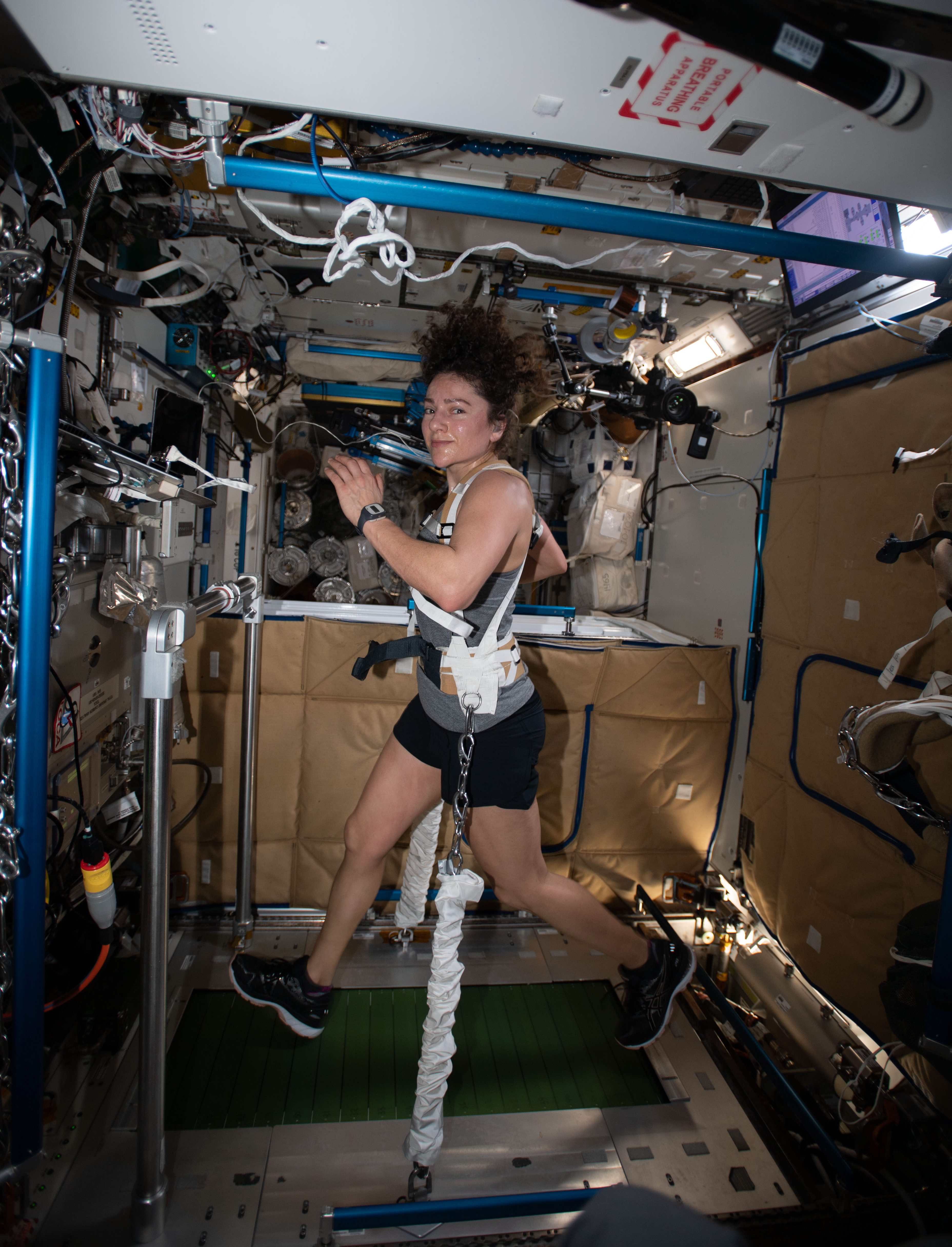
Astronauts aboard the station exercise for roughly two hours a day to protect bone density, muscle strength, and the cardiovascular system, but the longer they are in microgravity, the harder it can be for the brain and body to readapt to gravity’s pull. After months in orbit, returning astronauts often describe Earth as heavy, loud, and strangely still. Some reacclimate within days, while other astronauts take longer to fully recover.
Through HRP-led studies, scientists track these changes and test solutions—from improved exercise regimens to medical monitoring and nutritional strategies. The results inspire new medical technologies, while teaching scientists how the human body adapts to long-duration spaceflights—knowledge that helps keep astronauts healthy on future missions.
In the Tranquility node of the orbiting laboratory, NASA astronaut Jessica Meir exercises on the Combined Operational Load Bearing External Resistance Treadmill (COLBERT), technically named the Treadmill 2 and abbreviated as T2. NASAThe space station continues to be a critical platform for sharpening skills, technology, and understanding that will prepare humanity to return to the Moon with NASA’s Artemis campaign and journey on to Mars and beyond.
Since space presents an entirely new physical environment with a distinct set of challenges, the orbiting laboratory is uniquely positioned to support research and preparations not possible on Earth. That includes:
- Mastering techniques for basic tasks like drinking water, sleeping, exercising, and handling various materials.
- Developing solutions to microgravity-induced changes to and challenges for the human body.
- Testing reliable technologies and self-sustaining ecosystems necessary for deep space travel, from life support systems to in-orbit agriculture and 3D printing of materials.
- Refining techniques and procedures for data and imagery collection and analysis.
Read more about how the space station has enabled significant strides in our journey farther into the final frontier.
The first decade of the space station was the decade of construction. The second decade moved from initial studies to fully using the orbiting laboratory. Now we are in the decade of results.
With nearly 25 years of experiments conducted aboard the station, more breakthroughs are materializing than ever before. These scientific discoveries and technological advancements are benefiting humanity on the ground, contributing to the growing low Earth orbit economy, and helping to prepare for future exploration of the Moon and Mars.
Innovations include:
- Advances in X-ray technologies, developed to create a space station telescope, are helping unravel the mysteries of our universe while improving medical devices on Earth.
- Temperature-change data that has been employed in efforts to reduce heat absorbed by city surfaces, reduce fire risk, and help farmers efficiently water their fields.
- Demonstrations of robotic technologies with the potential to relieve repetitive movement and other workplace-related stressors.
- Development of a small ultrasound unit for crew health monitoring that has since been adapted to provide diagnostic care in remote areas on Earth.
Find more information about the space station’s benefits for humanity here.
Explore More 4 min read NASA Celebrates Artemis II During Houston Texans Space City Day Article 10 hours ago 4 min read Supernova Remnant Video From NASA’s Chandra Is Decades in Making Article 1 day ago 2 min read Space Station Research Informs New FDA-Approved Cancer Therapy Article 2 days agoLightning from Above
Lightning from Above
NASA astronaut Nichole Ayers captured this image of lightning while orbiting aboard the International Space Station more than 250 miles above Milan, Italy on July 1, 2025. Storm observations from space station help scientists study Earth’s upper atmosphere, which can improve weather models and protect communication systems and aircraft. Space station crew take photographs of Earth that record how the planet changes over time due to human activity and natural events. This record allows scientists to monitor disasters and direct response on the ground and study phenomena.
Image credit: NASA/Nichole Ayers
Lightning from Above
NASA astronaut Nichole Ayers captured this image of lightning while orbiting aboard the International Space Station more than 250 miles above Milan, Italy on July 1, 2025. Storm observations from space station help scientists study Earth’s upper atmosphere, which can improve weather models and protect communication systems and aircraft. Space station crew take photographs of Earth that record how the planet changes over time due to human activity and natural events. This record allows scientists to monitor disasters and direct response on the ground and study phenomena.
Image credit: NASA/Nichole Ayers
Algae Swirls Across a South African Reservoir
- Earth
- Earth Observatory
- Image of the Day
- EO Explorer
- Topics
- More Content
- About
Algae Swirls Across a South African Reservoir
- Earth
- Earth Observatory
- Image of the Day
- EO Explorer
- Topics
- More Content
- About
Supernova Remnant Video From NASA’s Chandra Is Decades in Making
To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video
A new video shows changes in Kepler’s Supernova Remnant using data from NASA’s Chandra X-ray Observatory captured over more than two and a half decades with observations taken in 2000, 2004, 2006, 2014, and 2025. In this video, which is the longest-spanning one ever released by Chandra, X-rays (blue) from the telescope have been combined with an optical image (red, green, and blue) from Pan-STARRS. X-ray: NASA/CXC/SAO; Optical: Pan-STARRSA new video shows the evolution of Kepler’s Supernova Remnant using data from NASA’s Chandra X-ray Observatory captured over more than two and a half decades.
Kepler’s Supernova Remnant, named after the German astronomer Johannes Kepler, was first spotted in the night sky in 1604. Today, astronomers know that a white dwarf star exploded when it exceeded a critical mass, after pulling material from a companion star, or merging with another white dwarf. This kind of supernova is known as a Type Ia, and scientists use it to measure the expansion of the universe.
Supernova remnants, the debris fields left behind after a stellar explosion, often glow strongly in X-ray light because the material has been heated to millions of degrees from the blast. The remnant is located in our galaxy, about 17,000 light-years from Earth, allowing Chandra to make detailed images of the debris and how it changes with time. This latest video includes its X-ray data from 2000, 2004, 2006, 2014, and 2025. This makes it the longest-spanning video that Chandra has ever released, enabled by Chandra’s longevity.
“The plot of Kepler’s story is just now beginning to unfold,” said Jessye Gassel, a graduate student at George Mason University in Virginia, who led the work. “It’s remarkable that we can watch as these remains from this shattered star crash into material already thrown out into space.” Gassel presented the new Chandra video and the associated research at the 247th meeting of the American Astronomical Society in Phoenix.
The researchers used the video to show that the fastest parts of the remnant are traveling at about 13.8 million miles per hour (2% of the speed of light), moving toward the bottom of the image. Meanwhile, the slowest parts are traveling toward the top at about 4 million miles per hour (0.5% of the speed of light). This large difference in speed is because the gas that the remnant is plowing into toward the top of the image is denser than the gas toward the bottom. This gives scientists information about the environments into which this star exploded.
“Supernova explosions and the elements they hurl into space are the lifeblood of new stars and planets,” said Brian Williams of NASA’s Goddard Space Flight Center in Greenbelt, Maryland, and principal investigator of the new Chandra observations of Kepler. “Understanding exactly how they behave is crucial to knowing our cosmic history.”
The team also examined the widths of the rims forming the blast wave of the explosion. The blast wave is the leading edge of the explosion and the first to encounter material outside of the star. By measuring how wide it is and how fast it is traveling, astronomers glean more information about both the explosion of the star and its surroundings.
NASA’s Marshall Space Flight Center in Huntsville, Alabama, manages the Chandra program. The Smithsonian Astrophysical Observatory’s Chandra X-ray Center controls science operations from Cambridge, Massachusetts, and flight operations from Burlington, Massachusetts.
To learn more about Chandra, visit:
https://science.nasa.gov/chandra
Read more from NASA’s Chandra X-ray Observatory
Learn more about the Chandra X-ray Observatory and its mission here:
Visual DescriptionThis release features a ten second silent video of Kepler’s expanding Supernova Remnant, located in our own galaxy, about 17,000 light-years from Earth. The video was created using X-ray data gathered in 2000, 2004, 2006, 2014, and 2025. Those distinct datasets were turned into highly-detailed visuals, creating a 25-year timelapse-style video of the growing remnant.
Kepler’s Supernova Remnant was once a white dwarf star that exploded when it exceeded its critical mass. Here, in X-ray light, the remnant resembles a cloudy neon blue ring with a diagonal cross line stretching from our upper right down to our lower left. The ring appears thinner and wispier at the bottom, with a band of white arching across the top.
As the video plays, cycling through the 5 datasets, the ring subtly, but clearly, expands, like a slowly inflating balloon. In the video, this sequence is replayed several times with dates included at our lower right, to give sighted learners time to absorb the visual information. Upon close inspection, researchers have determined that the bottom of the remnant is expanding fastest; about 13.8 million miles per hour, or 2% of the speed of light. The top of the ring appears to be expanding the slowest; about 4 million miles per hour, or 0.5% of the speed of light. The large difference in speed is because the gas that the remnant is plowing into towards the top of the image is denser than the gas towards the bottom.
Collecting and interpreting this data over decades has provided information about the environment into which the white dwarf star exploded, and has helped scientists understand how remnants change with time.
Share Details Last Updated Jan 06, 2026 EditorLee MohonContactJoel WallaceLocationMarshall Space Flight Center Related Terms Explore More 6 min read NASA Marshall Prepares for Demolition of Historic Test, Simulation Facilities Article 22 hours ago 5 min read Scientists Identify ‘Astronomy’s Platypus’ with NASA’s Webb TelescopeAfter combing through NASA’s James Webb Space Telescope’s archive of sweeping extragalactic cosmic fields, a…
Article 24 hours ago 6 min read NASA Webb Finds Early-Universe Analog’s Unexpected Talent for Making DustUsing NASA’s James Webb Space Telescope, astronomers have spotted two rare kinds of dust in…
Article 24 hours ago Keep Exploring Discover More Topics From NASA ChandraSpace Telescope
Hubble Space TelescopeHubble, the observatory, is the first major optical telescope to be placed in space, the ultimate mountaintop. Above the distortion…
James Webb Space TelescopeWebb is the premier observatory of the next decade, serving thousands of astronomers worldwide. It studies every phase in the…
Spitzer Space TelescopeSpitzer uses an ultra-sensitive infrared telescope to study asteroids, comets, planets and distant galaxies.
Supernova Remnant Video From NASA’s Chandra Is Decades in Making
To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video
A new video shows changes in Kepler’s Supernova Remnant using data from NASA’s Chandra X-ray Observatory captured over more than two and a half decades with observations taken in 2000, 2004, 2006, 2014, and 2025. In this video, which is the longest-spanning one ever released by Chandra, X-rays (blue) from the telescope have been combined with an optical image (red, green, and blue) from Pan-STARRS. X-ray: NASA/CXC/SAO; Optical: Pan-STARRSA new video shows the evolution of Kepler’s Supernova Remnant using data from NASA’s Chandra X-ray Observatory captured over more than two and a half decades.
Kepler’s Supernova Remnant, named after the German astronomer Johannes Kepler, was first spotted in the night sky in 1604. Today, astronomers know that a white dwarf star exploded when it exceeded a critical mass, after pulling material from a companion star, or merging with another white dwarf. This kind of supernova is known as a Type Ia, and scientists use it to measure the expansion of the universe.
Supernova remnants, the debris fields left behind after a stellar explosion, often glow strongly in X-ray light because the material has been heated to millions of degrees from the blast. The remnant is located in our galaxy, about 17,000 light-years from Earth, allowing Chandra to make detailed images of the debris and how it changes with time. This latest video includes its X-ray data from 2000, 2004, 2006, 2014, and 2025. This makes it the longest-spanning video that Chandra has ever released, enabled by Chandra’s longevity.
“The plot of Kepler’s story is just now beginning to unfold,” said Jessye Gassel, a graduate student at George Mason University in Virginia, who led the work. “It’s remarkable that we can watch as these remains from this shattered star crash into material already thrown out into space.” Gassel presented the new Chandra video and the associated research at the 247th meeting of the American Astronomical Society in Phoenix.
The researchers used the video to show that the fastest parts of the remnant are traveling at about 13.8 million miles per hour (2% of the speed of light), moving toward the bottom of the image. Meanwhile, the slowest parts are traveling toward the top at about 4 million miles per hour (0.5% of the speed of light). This large difference in speed is because the gas that the remnant is plowing into toward the top of the image is denser than the gas toward the bottom. This gives scientists information about the environments into which this star exploded.
“Supernova explosions and the elements they hurl into space are the lifeblood of new stars and planets,” said Brian Williams of NASA’s Goddard Space Flight Center in Greenbelt, Maryland, and principal investigator of the new Chandra observations of Kepler. “Understanding exactly how they behave is crucial to knowing our cosmic history.”
The team also examined the widths of the rims forming the blast wave of the explosion. The blast wave is the leading edge of the explosion and the first to encounter material outside of the star. By measuring how wide it is and how fast it is traveling, astronomers glean more information about both the explosion of the star and its surroundings.
NASA’s Marshall Space Flight Center in Huntsville, Alabama, manages the Chandra program. The Smithsonian Astrophysical Observatory’s Chandra X-ray Center controls science operations from Cambridge, Massachusetts, and flight operations from Burlington, Massachusetts.
To learn more about Chandra, visit:
https://science.nasa.gov/chandra
Read more from NASA’s Chandra X-ray Observatory
Learn more about the Chandra X-ray Observatory and its mission here:
Visual DescriptionThis release features a ten second silent video of Kepler’s expanding Supernova Remnant, located in our own galaxy, about 17,000 light-years from Earth. The video was created using X-ray data gathered in 2000, 2004, 2006, 2014, and 2025. Those distinct datasets were turned into highly-detailed visuals, creating a 25-year timelapse-style video of the growing remnant.
Kepler’s Supernova Remnant was once a white dwarf star that exploded when it exceeded its critical mass. Here, in X-ray light, the remnant resembles a cloudy neon blue ring with a diagonal cross line stretching from our upper right down to our lower left. The ring appears thinner and wispier at the bottom, with a band of white arching across the top.
As the video plays, cycling through the 5 datasets, the ring subtly, but clearly, expands, like a slowly inflating balloon. In the video, this sequence is replayed several times with dates included at our lower right, to give sighted learners time to absorb the visual information. Upon close inspection, researchers have determined that the bottom of the remnant is expanding fastest; about 13.8 million miles per hour, or 2% of the speed of light. The top of the ring appears to be expanding the slowest; about 4 million miles per hour, or 0.5% of the speed of light. The large difference in speed is because the gas that the remnant is plowing into towards the top of the image is denser than the gas towards the bottom.
Collecting and interpreting this data over decades has provided information about the environment into which the white dwarf star exploded, and has helped scientists understand how remnants change with time.
Share Details Last Updated Jan 06, 2026 EditorLee MohonContactJoel WallaceLocationMarshall Space Flight Center Related Terms Explore More 4 min read 25 Years in Orbit: Science, Innovation, and the Future of Exploration Article 12 hours ago 6 min read NASA Marshall Prepares for Demolition of Historic Test, Simulation Facilities Article 2 days ago 5 min read Scientists Identify ‘Astronomy’s Platypus’ with NASA’s Webb TelescopeAfter combing through NASA’s James Webb Space Telescope’s archive of sweeping extragalactic cosmic fields, a…
Article 2 days ago Keep Exploring Discover More Topics From NASA ChandraSpace Telescope
Hubble Space TelescopeHubble, the observatory, is the first major optical telescope to be placed in space, the ultimate mountaintop. Above the distortion…
James Webb Space TelescopeWebb is the premier observatory of the next decade, serving thousands of astronomers worldwide. It studies every phase in the…
Spitzer Space TelescopeSpitzer uses an ultra-sensitive infrared telescope to study asteroids, comets, planets and distant galaxies.
NASA Awards Launch Range Contract for Wallops Flight Facility
NASA has selected ARES Technical Services Corporation of McLean, Virginia, to provide launch range operations support at the agency’s Wallops Flight Facility in Virginia.
The Wallops Range Contract has a total potential value of $339.8 million with a one-year base period expected to begin Tuesday, Feb. 10, and four one-year option periods that if exercised would extend it to 2031. The contract includes a cost-plus-fixed-fee core with an indefinite-delivery/indefinite-quantity component and the ability to issue cost-plus-fixed-fee or firm-fixed-price task orders.
The scope of the work includes launch range operations support such as radar, telemetry, logistics, tracking, and communications services for flight vehicles including orbital and suborbital rockets, aircraft, satellites, balloons, and unmanned aerial systems. Additional responsibilities include information and computer systems services; testing, modifying, and installing communications and electronic systems at launch facilities, launch control centers, and test facilities; and range technology sustainment engineering services.
Work will primarily occur at NASA Wallops with additional support at sites such as the agency’s Bermuda Tracking Station, Poker Flat Research Range in Alaska, and other temporary duty locations.
For information about NASA and agency programs, visit:
-end-
Tiernan Doyle
Headquarters, Washington
202-358-1600
tiernan.doyle@nasa.gov
Robert Garner
Goddard Space Flight Center, Greenbelt, Md.
301-286-5687
rob.garner@nasa.gov
NASA Awards Launch Range Contract for Wallops Flight Facility
NASA has selected ARES Technical Services Corporation of McLean, Virginia, to provide launch range operations support at the agency’s Wallops Flight Facility in Virginia.
The Wallops Range Contract has a total potential value of $339.8 million with a one-year base period expected to begin Tuesday, Feb. 10, and four one-year option periods that if exercised would extend it to 2031. The contract includes a cost-plus-fixed-fee core with an indefinite-delivery/indefinite-quantity component and the ability to issue cost-plus-fixed-fee or firm-fixed-price task orders.
The scope of the work includes launch range operations support such as radar, telemetry, logistics, tracking, and communications services for flight vehicles including orbital and suborbital rockets, aircraft, satellites, balloons, and unmanned aerial systems. Additional responsibilities include information and computer systems services; testing, modifying, and installing communications and electronic systems at launch facilities, launch control centers, and test facilities; and range technology sustainment engineering services.
Work will primarily occur at NASA Wallops with additional support at sites such as the agency’s Bermuda Tracking Station, Poker Flat Research Range in Alaska, and other temporary duty locations.
For information about NASA and agency programs, visit:
-end-
Tiernan Doyle
Headquarters, Washington
202-358-1600
tiernan.doyle@nasa.gov
Robert Garner
Goddard Space Flight Center, Greenbelt, Md.
301-286-5687
rob.garner@nasa.gov
NASA Marshall Prepares for Demolition of Historic Test, Simulation Facilities
NASA is preparing for the demolition of three iconic structures at the agency’s Marshall Space Flight Center in Huntsville, Alabama.
Crews began demolition in mid-December at the Neutral Buoyancy Simulator, a facility built in the late 1960s that once enabled NASA astronauts and researchers to experience near-weightlessness. The facility was also used to conduct underwater testing of space hardware and practice runs for servicing the Hubble Space Telescope. The simulator was closed in 1997.
Two test stands – the Propulsion and Structural Test Facility and Dynamic Test Facility – are also slated for demolition, one after the other, by carefully coordinated implosion no earlier than sunrise on Jan. 10, 2026.
NASA Marshall tests fires the first stage of the Saturn I rocket at its historic Propulsion and Structural Test Facility, better known as the “T-tower.”The demolition of these historic structures is part of a larger project that began in spring 2022, targeting several inactive structures no longer needed for the agency’s missions. All three towering fixtures played crucial roles in getting humans to the Moon, into low-Earth orbit, and beyond.
These structures have reached the end of their safe, operational life, and their removal has been long-planned as part of a broader effort to modernize Marshall’s footprint. This demolition is the first phase of an initiative that will ultimately remove 25 outdated structures, reduce maintenance burdens, and position Marshall to take full advantage of a guaranteed NASA center infrastructure investment authorized under the Working Families Tax Credit Act.
This work reflects smart stewardship of taxpayer resources.jared isaacman
NASA Administrator
“This work reflects smart stewardship of taxpayer resources,” said NASA Administrator Jared Isaacman. “Clearing outdated infrastructure allows NASA to safely modernize, streamline operations, and fully leverage the infrastructure investments signed into law by President Trump to keep Marshall positioned at the forefront of aerospace innovation.”
Built in 1964, the Dynamic Test Stand initially was used to test fully assembled Saturn V rockets. In 1978, engineers integrated all space shuttle elements for the first time, including the orbiter, external fuel tank, and solid rocket boosters. It was last used in the early 2000s for microgravity testing.
The space shuttle orbiter Enterprise lifted by crane into the Structural Dynamic Test Facility at NASA’s Marshall Space Flight Center in Huntsville, Alabama, for vibration testing in July 1978.NASAThe Propulsion and Structural Test Facility – better known at Marshall as the “T-tower” due to its unique shape – was built in 1957 by the U.S. Army Ballistic Missile Agency and transferred to NASA when Marshall was founded in 1960. There, engineers tested components of the Saturn launch vehicles, the Army’s Redstone Rocket, and shuttle solid rocket boosters. It was last used for space shuttle solid rocket motor tests in the 1990s.
“Each one of these structures helped NASA make history,” said Rae Ann Meyer, acting center director at Marshall. “While it is hard to let them go, they’ve earned their retirement. The people who built and managed these facilities and empowered our mission of space exploration are the most important part of their legacy.”
“These structures are not safe,” continued Meyer. “Strategic demolition is a necessary step in shaping the future of NASA’s mission to explore, innovate, and inspire. By removing these structures that we have not used in decades, we are saving money on upkeep of facilities we can’t use. We also are making these areas safe to use for future NASA exploration endeavors and investments.”
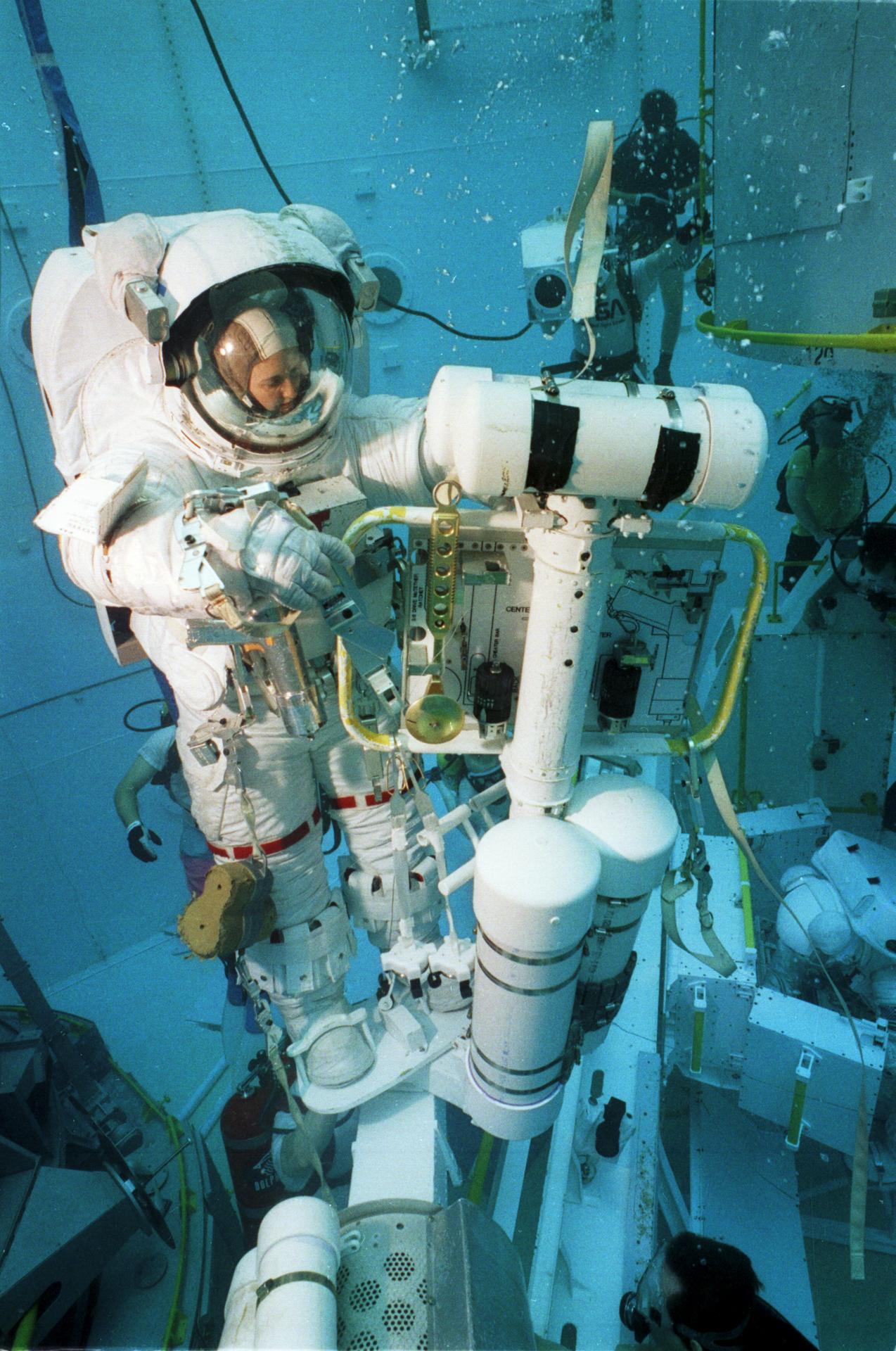
A legacy worth rememberingWhen NASA opened the Neutral Buoyancy Simulator in 1968, it was one of few places on Earth that could recreate the weightlessness of microgravity. The facility provided a simulated zero-gravity environment in which engineers and astronauts could find out how their designs might handle in orbit. The tank has been central to planning and problem-solving for Skylab missions, repairs to NASA’s Hubble Space Telescope, and more. The tank is 75 feet in diameter, 40 feet deep, and designed to hold up to nearly 1.5 million gallons of water. It was replaced in 1997 by a new, larger facility at NASA’s Johnson Space Center in Houston.
Astronaut Kathryn Thornton practices maneuvers planned for the STS-61 mission in the Neutral Buoyancy Simulator at NASA’s Marshall Space Flight Center in Huntsville, Alabama, on Aug. 9, 1993.NASAThe Propulsion and Structural Test Facility is one of the oldest test stands at Marshall. The dual-position test stand, sometimes called the T-tower, was built for static testing large rockets and launch systems – like launching a rocket while keeping it restrained and wired to instruments that collect data. The tests and data played a role in the development of the Saturn family of rockets, including the F-1 engine and S-IC.
The Dynamic Test Stand, a 360-foot tower topped by a 64-foot derrick, was once the tallest human-made structure in North Alabama. Engineers there conducted full-scale tests of Saturn V rockets – the same powerful vehicles that carried Apollo astronauts to the Moon. Later, the stand served as the first location where all space shuttle elements were integrated.
Preserving history for future generationsThe irreplaceable historical value of these landmarks has prompted NASA to undertake extensive efforts to preserve their stories for future generations. The three facilities were made national landmarks in 1985 for their part in human spaceflight. In keeping with Section 106 of the National Historic Preservation Act, master planners and engineers at Marshall completed a rigorous consultation and mitigation process for each landmark, working closely with Alabama’s State Historic Preservation Office to preserve their history for future generations.
Detailed architectural documentation, written histories, and large-format photographs are permanently archived in the Library of Congress’ Historic American Engineering Record collection, making this history accessible to researchers and the public for generations.
Additionally, NASA has partnered with Auburn University to create high-resolution digital models of each facility. The project used technologies like LiDAR and 360-photography of the structures in detail before demolition. Their goal is to preserve not just the appearance, but the sense of scale and engineering achievement they represent. The models are still in work, but they’ll eventually be publicly available.
Select artifacts from the facilities have also been identified and transferred to the U.S. Space & Rocket Center through NASA’s Artifact Program, ensuring tangible pieces of this history remain available for educational purposes.
Honoring the past, building the futureFor the employees, retirees, and community members who remember these facilities over the decades, their removal marks the end of an era. But their contributions live on in every NASA mission, from the International Space Station to the upcoming Artemis II lunar missions and more.
“NASA’s vision of space exploration remains vibrant, and as we look to an exciting future, we honor the past, especially the dedication of the men and women who built these structures and tested hardware that has launched into space, made unprecedented scientific discoveries, and inspired generations of Americans to reach for the stars,” said Meyer.
The demolitions represent more than removing obsolete infrastructure. They’re part of NASA’s commitment to building a dynamic, interconnected campus ready for the next era of space exploration while honoring the bold spirit that has always driven the agency forward.
Virtual tours and preserved documentation will be made available on Marshall’s digital channels. Marshall will also share video of the test stand demolitions after the event.
For communities near Redstone Arsenal, there could be a loud noise associated with the demolition on the morning of Jan. 10.
Share Details Last Updated Jan 06, 2026 EditorLee MohonContactLance D. Davislance.d.davis@nasa.govMolly Portermolly.a.porter@nasa.govLocationMarshall Space Flight Center Related Terms Keep Exploring Discover More Topics From NASAMarshall Space Flight Center
About Marshall Space Flight Center
Marshall Space Flight Center History
NASA History
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}